Mars rovers are typically very slow. Curiosity, for example, has average speed of about 30 meters per hour.
Why is it designed so slow? Is it because of some specific power restrictions or for other reasons? What is the top reason why it is so slow?
Mars rovers are typically very slow. Curiosity, for example, has average speed of about 30 meters per hour.
Why is it designed so slow? Is it because of some specific power restrictions or for other reasons? What is the top reason why it is so slow?
It has more to do with the rocker bogie suspension than anything else.
The system is designed to be used at slow speed of around 10 cm/s, so as to minimize dynamic shocks and consequential damage to the vehicle when surmounting sizable obstacles.
In exchange for moving slowly, the rover is able to climb rocks that are double the wheel diameter (normal suspension has trouble with anything over half the wheel diameter). This is important when travelling in — literally — an alien landscape.
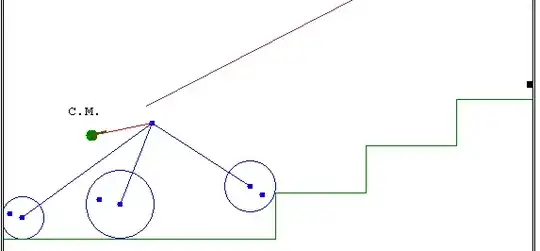
(image via http://en.smath.info/forum/yaf_postst995p2_Animation-of-mechanisms.aspx)
There are other benefits that come with slow speed: better correlation between successive frames captured by its navigation cameras, more time to plan its path, and power savings. However, without the capabilities provided by the suspension system — surmounting the obstacles present on the martian surface without getting stuck or causing damage — the other benefits are moot.
This seems like a softball question but is surprisingly subtle. There are some excellent answers here, but I can add some basic rigor.
The reason the rovers move so slow is essentially the need to be cautious with a multi-million-dollar piece of equipment. But there are some other design constraints worth mentioning.
Energy is simply the worst bottleneck for mobile, autonomous systems. The energy cost for a system to relocate across a surface can be typically modeled as $$ \int^{T_{final}}_{T_{initial}} [ c_0 v(t)^2 + c_1 a(t)^2 + c_3v(t) + c_4a(t) + c_5v(t)*a(t) + C ]dt $$ where $c_0...c_6$ are constants representing the motor parameters (see here and here). So the cost of travelling to a nearby crater is proportional to the square of the velocity and square of the acceleration. Thus, slower costs less power overall. There is usually a "tipping speed" at which the power consumption spikes, and this is usually a very slow speed. Thus, robots move slow to save power. Additionally, this means a robot cannot carry energy-intensive sensors like LIDAR. Note LIDAR is used extensively in autonomous, driverless vehicles like the Google Car. Which brings me to...
Computational Sensing. Note, we're not considering power. Now, we have to realize that the robot is autonomous (i.e., driver-less). Given the reduced sensors, a robot cannot model its whole environment, and plan a large route. Think of it this way, would you run through the forest in the dark? Not if you didn't need to. The robot is constantly "in the dark" since it cannot see very far ahead, so it moves slowly, carefully planning each step. The memory and cpu required to plan these things is $O(r^3)$ or worse, where $r$ is the radius of planning. see here and here
Communication Delays. As mentioned, the robot is i) autonomous, and ii), sensing-limited. The humans have to constantly "check-in" to make sure the robot isn't doing something stupid (despite its state of the art planning algorithms). This means the robot will wait for instructions a lot, thus slow average progress towards a goal. The previous references address this.
Stability. To achieve stability / robustness, the rovers use the rocker-bogie system. see this. This system is designed to be operated at slow speeds. If you go fast, and hit a rock, you break your rover. Try to imagine doing that sensor-based motion planning. Now try to do so when all your relevant sensors are on a mast attached to the top of your robot, and you'll see that keeping the sensing payload stable is very important.
I'm not such an expert in physics, but I can think of a few reasons:
Stability. I believe I don't need to give you formulas for this phenomenon:

Simply put, the slower you go, the smaller the chance of lifting off over a ridge and possibly losing your stability when you land.
Note that some of these issues, such as stability, are true for robots on earth too. However, here on earth we can always flip the vehicle if it turned over, but on Mars we can't trust Martians on it (they may like the rover stuck on its back and start worshipping it, which is totally not cool for us).
E = Pt, but P~1/t^3 or something else, I don't remember exactly). I was looking for the formula and as soon as I got E=1/2mv^2 I assumed all is good.
– Shahbaz
Dec 14 '12 at 17:07
One reason is because of the communications delay between Earth and Mars.
The round trip time for signals from Earth to Mars is several minutes, which means that you can't teleoperate the robot in realtime. That means that the robot needs some autonomous obstacle avoidance capability to help prevent it from getting stuck or otherwise in trouble.
The hazard avoidance equipment on mars rovers is generally designed in a very conservative way, which means drive slow and stop frequently to check your environment.
From Wikipedia, for the Mars Exploration Rovers (Spirit and Opportunity):
...hazard avoidance software causes it to stop every 10 seconds for 20 seconds to observe and understand the terrain into which it has driven.
hazard avoidance is the wrong paradigm. The robot should act like a cockroach after a crash landing after 50 m vertical down flight: get up and boogie. You can test that even on earth, not light minutes away on Mars.
– ott--
Jun 21 '13 at 20:33