
Hi rozoalex,
You can find an overview of how the ROS navigation stack works here: http://wiki.ros.org/nav_core?distro=lunar
Details of the local planner here: http://wiki.ros.org/base_local_planner?distro=lunar
Details of the global planner here: http://wiki.ros.org/global_planner?distro=lunar
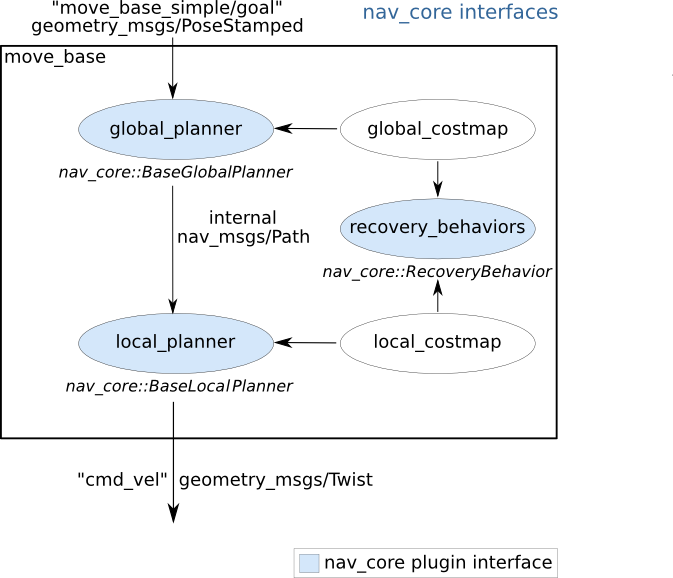
This is the basic scheme:
image description http://wiki.ros.org/nav_core?action=AttachFile&do=get&target=move_base_interfaces.png
As you can see, both the local planner and the global planner use a costmap (a 2D o 3D representation of free/occupied space) constructed using sensor information.
If you want to add information from new sensors for the local costmap to consider you should do so by adding new layers to the local costmap. The layer type will depend on the sensor type. You should check the tutorials and documentation of the costmap_2d package.
I hope this helps
Originally posted by Martin Peris with karma: 5625 on 2017-10-22
This answer was ACCEPTED on the original site
Post score: 1
Original comments
Comment by rozoalex on 2017-10-26:
Thank you so much! Very helpful!
{kind=link}