Speed tips:
- Explicit is faster than implicit.
"DiscontinuityProcessing" is your friend.
Other tips:
WhenEvent is mysterious sometimes, but not here.- Functions should depend only on their arguments (best practice).
- If
1/10^6 is to be a significant value to NDSolve, AccuracyGoal probably has be somewhat larger than 6.
Irrelevent, gratuitous tips:
- I hate curly phi. :)
- I hope I didn't break anything in refactoring. (Maybe not irrelevant. We'll see.)
Some slight refactoring of the OP's code before converting it to an explicit ODE:
R = 0.0238;
k = 141000000;
c = 20;
g = 9.81;
μk = 0.1804;
i = 6*10^-6;
m = 0.035;
l = R Sqrt[2 (1 + Sin[-(1/2) π - 2*f])];
f = 0.223;
With[{nt = n[z[y[t], phi[t]], D[z[y[t], phi[t]], t]]},
odeOP = {m y''[t] == nt - m g
, phi''[t] ==
1/i (nt l Sin[phi[t]] + m x''[t] l Cos[phi[t]])
, x''[t] ==
Simplify`PWToUnitStep@PiecewiseExpand@If[
Abs[x'[t] + l phi'[t]] < 1/10^6
, l (phi''[t] Cos[phi[t]] - phi'[t]^2 Sin[phi[t]])
, -If[x'[t] + l phi'[t] >= 0, 1, -1] (μk nt)/m
]}
];
Redefine n[], z[]. Differentiate to convert to explicit ODEs. Handle the nondifferentiable functions like Abs and UnitStep. Use odeOP above to fill in missing initial conditions for x''[0] and phi''[0]. NDSolve automatically converts If, Piecewise, UnitStep to discrete events, but I did one of them manually (sgn[t]). I usually don't like Print statements because they can fill a notebook and wrest control from you, if they unexpectedly get out of hand. But I wanted a quick way to check whether an event was detected.
ClearAll[z, n];
z[y_, phi_] := y - l Cos[phi];
n[z_, zp_] := k Abs[z]^(3/2) - c zp;
With[{nt = n[z[y[t], phi[t]], D[z[y[t], phi[t]], t]]},
odes = {m y''[t] == nt - m g
, phi'''[t] == D[
1/i (nt l Sin[phi[t]] + m x''[t] l Cos[phi[t]]) /.
{UnitStep -> us, Abs -> abs},
t]
, x'''[t] == D[
Simplify`PWToUnitStep@PiecewiseExpand@If[
-(1/10^6) < x'[t] + l phi'[t] < 1/10^6
, l (phi''[t] Cos[phi[t]] - phi'[t]^2 Sin[phi[t]])
, -sgn[t] (μk nt)/m
] /. {UnitStep -> us, Abs -> abs},
t]
} /. {us'[_] -> 0, abs' -> (2 UnitStep[#] - 1 &), sgn'[t] -> 0} /.
{us -> UnitStep, abs -> Abs};
ics = {y[0] == l Cos[f]
, y'[0] == -2.22
, phi[0] == f
, phi'[0] == -56
, x[0] == 0
, x'[0] == 0
};
ics = Join[ics, odeOP[[2 ;; 3]] /. t -> 0 /. First@Solve[ics]];
ics = Join[ics,
sgn[0] == Sign[x'[t] + l phi'[t]] /. t -> 0 /. Solve[ics]];
evts = {WhenEvent[z[y[t], phi[t]] == 0,
{Print["Stopping at ", t]; "StopIntegration"}]
, WhenEvent[x'[t] + l phi'[t] > -1/10^6,
{Print["1" -> {InputForm@t, x'[t] + l phi'[t]}];
x''[t] -> l (phi''[t] Cos[phi[t]] - phi'[t]^2 Sin[phi[t]])}]
, WhenEvent[x'[t] + l phi'[t] < -1/10^6,
{Print["2" -> {InputForm@t, x'[t] + l phi'[t]}];
x''[t] -> -sgn[t] (μk nt)/m}]
, WhenEvent[x'[t] + l phi'[t] > 1/10^6,
{Print["3" -> {InputForm@t, x'[t] + l phi'[t]}];
x''[t] -> -sgn[t] (μk nt)/m}]
, WhenEvent[x'[t] + l phi'[t] < 1/10^6,
{Print["4" -> {InputForm@t, x'[t] + l phi'[t]}];
x''[t] -> l (phi''[t] Cos[phi[t]] - phi'[t]^2 Sin[phi[t]])}]
, WhenEvent[x'[t] + l phi'[t] == 0,
{Print["5" -> {InputForm@t, x'[t] + l phi'[t]}];
sgn[t] -> -sgn[t]}]};
]
Run NDSolve. The monitor is something I use when code takes a long time to run, but it turns out not to be necessary with the "StiffnessSwitching" method. Use the Automatic method, and you can see the stiffness develop just after t = 0.001.
PrintTemporary@Dynamic@{Clock@Infinity, foo};
sol = NDSolve[{odes, ics, evts}
, {x, y, phi, sgn}
, {t, 0, 0.2}
, Method -> "StiffnessSwitching"
, AccuracyGoal -> 13, (* Note a high AccuracyGoal is needed *)
WorkingPrecision -> MachinePrecision,
PrecisionGoal -> 5, StepMonitor :> (foo = t),
DiscreteVariables -> {sgn},
MaxStepFraction -> 1/1000]; // AbsoluteTiming
1->{0.00014391781504231857, -1.*10^-6}
5->{0.00014391792439061524, 1.19071*10^-14}
3->{0.00014391803373883832, 1.*10^-6}
Stopping at 0.000385506
(* {0.085515, Null} *)
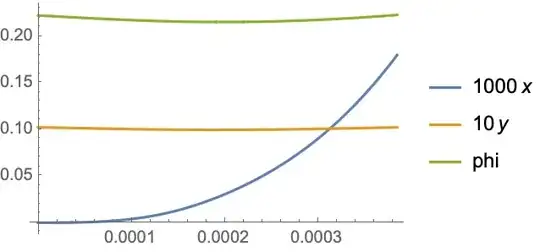
Plot[##, PlotLegends -> {1000, 10, 1} {x, y, phi}] & @@
{{10000, 10, 1} Through[{x, y, phi}[t]] /. First@sol,
Flatten@{t, x@"Domain" /. sol}}
Check events:
Plot @@ {z[y[t], phi[t]] /. First@sol, Flatten@{t, x@"Domain" /. sol}}
Plot @@ {x'[t] + l phi'[t] /. First@sol, Flatten@{t, x@"Domain" /. sol}}
Plot @@ {sgn[t] /. First@sol, Flatten@{t, x@"Domain" /. sol}}
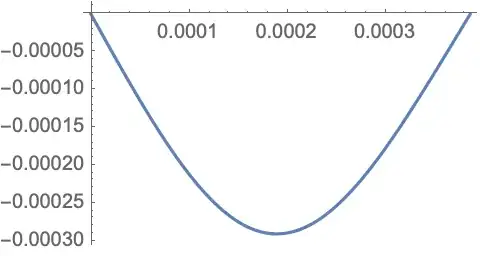


The second one, x'[t] + l phi'[t], controls the If[] statement in the OP (converted to WhenEvents) and sgn[t] and leads to events when its value is ±1/10^6 or 0. The quantity is changing so fast that one wonders if all the events are detected, which was verified by the Print statements in the events. The third plot shows that the sign change in sgn[t] is detected. Here is a visualization of the events. The so-called "signal" is the sign of the event Abs[x'[t] + l phi'[t]] - 1/10^6 == 0 from the If[] statement in the OP's ODE system.
Plot[
{2/1000000000, 1/2000, 1, 1} {x''[t], x''[t], sgn[t],
Sign[Abs[x'[t] + l phi'[t]] - 1/10^6]} /. First@sol // Evaluate,
{t, 0.00014391775, 0.00014391815},
PlotPoints -> 200,
PlotStyle -> {Thickness@Medium, Thickness@Medium, Directive[Thick],
Directive[Dashed, Thick]},
PlotLegends -> {2./1000000000, 1./2000, 1, 1} {x'', x'', sgn, signal}
]

x''[t] , \[CurlyPhi]''[t]seems to be the main problem forNDSolve. Where does it come from? Some kind of a friction model? – Ulrich Neumann Dec 31 '20 at 14:04WhenEvent-documentation of Mathematica? This model works quite well without switching between the second order derivatives(thereby changing the ode structure) and is very useful! – Ulrich Neumann Dec 31 '20 at 15:08\[Phi][t]? it should be 0.3. @MichaelE2 – bob the legend Dec 31 '20 at 15:54x[t],y[t]describe the motion of a pendulum with angle\[CurlyPhi][t]. Where does friction occur? – Ulrich Neumann Dec 31 '20 at 16:05phi'[t]==-56instead ofphi''[t]==-56. Thanks – bob the legend Dec 31 '20 at 16:11