To solve this problem we can use FDM code based on explicit Verlet step for the pendulum bob motion and implicit algorithm for the cantilever beam deformation. We use standard simplification to derive parameters $u,\lambda$ from equations (3) and (8) in a form
$u_s=\sqrt{1-v_s^2}-1, u=\int_0^su_sds$
$\lambda (1+u_s)=\lambda_0+\int_0^s(\mu u_{tt}+c u_t)ds$
Note that code with $\lambda(t,s)$ in a form above is terribly slow, while numerical results are not differ from that computed with $\lambda(t)$ only. Therefore we use simplified code as follows
(*Parameters *)
l = .815; n = 15; h = l/(n - 1);
EI = .096; g = 9.8;
[Mu] = 8.41 10^-3; mp = 0.033; R = 0.225; gamma = 2.02;
c = 1.51 10^-2; cp = 5.31 10^-4; alpha = 42/180 Pi;
dt = 5 10^-2; tmax = 20;
sgrid = Range[0, l, h];
tgrid = Range[0, tmax, dt]; jmax = nt = Length[tgrid]; nn =
Length[sgrid]; ds =
Table[NDSolve`FiniteDifferenceDerivative[i, sgrid,
"DifferenceOrder" -> 4]["DifferentiationMatrix"], {i, 4}];
U = Array[uu, {nn, nt}]; V = Array[vv, {nn, nt}]; lambda =
Array[ll, {nn, nt}]; lambda0 = Array[ll0, {nt}]; xp =
Array[xx, {nt}]; yp = Array[yy, {nt}]; zp = Array[zz, {nt}]; T1 =
Array[tt1, {nt}]; T2 = Array[tt2, {nt}]; Vpx =
Array[vpx, {nt}]; Vpy =
Array[vpy, {nt}]; fu = -T2 Cos[alpha] + T1 xp/R;(External force fu)
fv = -T2 Cos[alpha] V[[-1, All]]/l + T1 yp/R;(External force fv)
us = Sqrt[1 - (ds[[1]] . V)^2] - 1;(inextensibility constraint)
Do[uu[i, j] =
If[i == 1, 0,
h/2 Sum[(us[[k - 1, j]] + us[[k, j]]), {k, 2, i}]];, {i, nn}, {j,
nt}];(u[t,s]= Integrate[us,{x,0,s}] )
lambda0 = fu/(1 + us[[-1, All]]);
(the Lagrange multiplier
[Lambda](t,s)=[Lambda]0(t)+Integrate[[Mu] D[u[t,x],t,t]+c
D[u[t,x],t],{x,s,l}]/(1+D[u[t,s],s]))
bcrhs[j_] := (1 + 1/2 (ds[[1]] . V[[All, j]])^2) (ds[[2]] .
V[[All, j]])^2 +
ds[[2]] .
V[[All, j]] (2 ds[[1]] . V[[All, j]] ds[[2]] . V[[All, j]] +
4 (ds[[1]] . V[[All, j]])^3 ds[[2]] .
V[[All, j]]) + (1 + (ds[[1]] . V[[All, j]])^2 + (ds[[1]] .
V[[All, j]])^4) ds[[3]] . V[[All, j]];
(Initial Condition){x0, vx0, y0, vy0} = {.0, .1, 0,
0.01}; z0 = -Sqrt[R^2 - x0^2 - y0^2];
Do[uu[i, 1] = 0; uu[i, 2] = 0; vv[i, 1] = 0;
vv[i, 2] = 0;, {i, nn}]; Do[xx[i] = x0; vpx[i] = vx0; yy[i] = y0;
vpy[i] = vy0; zz[i] = z0; tt1[i] = -mp g R/z0;
tt2[i] = mp g/Sin[alpha], {i, 2}]; ll0[1] = -tt2[1] Cos[alpha];
ll0[2] = -tt2[2] Cos[alpha];
test = Table[.1, {nn}];
Do[(Verlet explicit step)
fx = If[j <= 2, 0,
mp (U[[-1, j]] + U[[-1, j - 2]] - 2 U[[-1, j - 1]])/dt^2 +
cp (U[[-1, j]] - U[[-1, j - 1]])/dt ];
fy = If[j <= 2, 0,
mp (V[[-1, j]] + V[[-1, j - 2]] - 2 V[[-1, j - 1]])/dt^2 +
cp (V[[-1, j]] - V[[-1, j - 1]])/dt ];
xx[j + 1] =
xx[j] + vpx[j] dt - (fx + cp vpx[j] + tt1[j] xx[j]/R) dt^2/2 ;
vpx[j + 1] = vpx[j] - (fx + cp vpx[j] + tt1[j] xx[j]/R) dt;
yy[j + 1] =
yy[j] + vpy[j] dt - (fy + cp vpy[j] + tt1[j] yy[j]/R) dt^2/2 ;
vpy[j + 1] = vpy[j] - (fy + cp vpy[j] + tt1[j] yy[j]/R) dt;
zz[j + 1] = -Sqrt[R^2 - xx[j + 1]^2 - yy[j + 1]^2];
tt1[j + 1] = -R/
zz[j + 1] (mp g + (mp (zz[j + 1] + zz[j - 1] - 2 zz[j])/dt^2 +
cp /dt/2 (zz[j + 1] - zz[j - 1])));
tt2[j + 1] = -tt1[j + 1] zz[j + 1]/R/ Sin[alpha];
(beam implicit step)
r2 = EI ds[[1]] . bcrhs[j + 1] -
lambda0[[j + 1]] (ds[[2]] . V[[All, j + 1]]);
eq2 = [Mu] (V[[All, j + 1]] + V[[All, j - 1]] - 2 V[[All, j]]) +
c dt/2 (V[[All, j + 1]] - V[[All, j - 1]]) + dt^2 r2;
eqs = Table[Drop[Drop[eq2, 2], -2][[i]] == 0, {i, nn - 4}];
varAll = V[[All, j + 1]];
bC0 = {(ds[[1]] . V[[All, j + 1]])[[1]] == 0, V[[1, j + 1]] == 0};
bC1 = {lambda0[[j + 1]] (ds[[1]] . V[[All, j + 1]])[[-1]] -
EI bcrhs[j + 1][[-1]] ==
fv[[j + 1]], (ds[[2]] . V[[All, j + 1]])[[-1]] == 0};
eqAll = Join[eqs, bC0, bC1];
ini = Table[{varAll[[i]], test[[i]]}, {i, Length[varAll]}];
sol = Quiet@
FindRoot[eqAll, ini,
Method -> {"Newton", "StepControl" -> "TrustRegion"},
MaxIterations -> 20]; test = varAll /. sol;
Do[vv[i, j + 1] = test[[i]], {i, nn}];, {j, 2,
jmax - 1}] // AbsoluteTiming
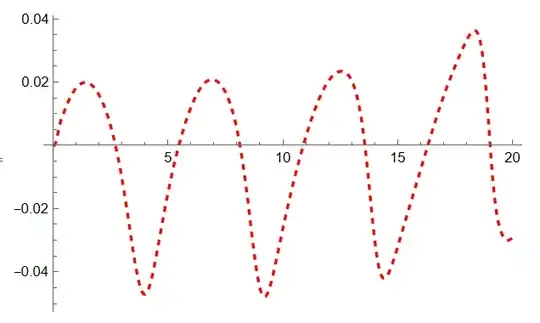
It takes about 205s on my laptop. Visualization of the cantilever beam tip and the pendulum bob movement
ListLinePlot[Transpose[{tgrid, V[[-1, All]]}],
PlotStyle -> {Dashed, Red}]
ListLinePlot[{Transpose[{tgrid, xp}], Transpose[{tgrid, yp}],
Transpose[{tgrid, zp}]}, PlotLegends -> {"x", "y", "z"}]

Forces acting on the cantilever beam and pendulum
ListLinePlot[{Transpose[{tgrid, T1}], Transpose[{tgrid, T2}],
Transpose[{tgrid, fu}], Transpose[{tgrid, fv}]},
PlotLegends -> {"T1", "T2", "fu", "fv"}]

Lagrange multiplier $\lambda$
ListLinePlot[Evaluate[Transpose[{tgrid, lambda0}]],
PlotStyle -> {Dashed, Red}]

Animation
frame3D2 =
Table[Show[
Graphics3D[{Red, PointSize[Large],
Point[{{xp[[j]] + l, yp[[j]] + V[[-1, j]], zp[[j]]}, {0, 0,
0}}], Blue,
Line[{{l, V[[-1, j]], 0}, {xp[[j]] + l, yp[[j]] + V[[-1, j]],
zp[[j]]}}], Tube[{{0, 0, -l}, {0, 0, l Tan[alpha]}}, 0.05],
Black, Line[{{0, 0, l Tan[alpha]}, {l, V[[-1, j]], 0}}]},
PlotRange -> {{0, l + R}, {-l, l}, {-l, l}}, Boxed -> False],
ListLinePlot3D[Table[{sgrid[[i]], V[[i, j]], 0}, {i, nn}],
ColorFunction -> Hue, Axes -> False]], {j, 1, jmax, 2}];
ListAnimate[frame3D2]

Update 1. With initial data {x0, vx0, y0, vy0} = {.0, .01, 0, 0.05} we have
 Animation
Animation

Update 2. In general case we can compute $\lambda(t,s)$ as well using integral term in the Lagrange multiplayer definition. The corresponding code is terribly slow due to FindRoot usage. Also this code is unstably at large t. In a case of transvers excitation (see Update 1) we have
(*Parameters *)
l = .815; n = 15; h = l/(n - 1);
EI = .096; g = 9.8;
[Mu] = 8.41 10^-3; mp = 0.033; R = 0.225; gamma = 2.02;
c = 1.51 10^-2; cp = 5.31 10^-4; alpha = 42/180 Pi;
dt = 5 10^-2; tmax = 15;
sgrid = Range[0, l, h];
tgrid = Range[0, tmax, dt]; jmax = nt = Length[tgrid]; nn =
Length[sgrid]; ds =
Table[NDSolve`FiniteDifferenceDerivative[i, sgrid,
"DifferenceOrder" -> 4]["DifferentiationMatrix"], {i, 4}];
U = Array[uu, {nn, nt}]; V = Array[vv, {nn, nt}]; lambda =
Array[ll, {nn, nt}]; lambda0 = Array[ll0, {nt}]; xp =
Array[xx, {nt}]; yp = Array[yy, {nt}]; zp = Array[zz, {nt}]; T1 =
Array[tt1, {nt}]; T2 = Array[tt2, {nt}]; Vpx =
Array[vpx, {nt}]; Vpy =
Array[vpy, {nt}]; fu = -T2 Cos[alpha] + T1 xp/R;(External force fu)
fv = -T2 Cos[alpha] V[[-1, All]]/l + T1 yp/R;(External force fv)
us = Sqrt[1 - (ds[[1]] . V)^2] - 1;(inextensibility constraint)
Do[uu[i, j] =
If[i == 1, 0,
h/2 Sum[(us[[k - 1, j]] + us[[k, j]]), {k, 2, i}]];, {i, nn}, {j,
nt}];(u[t,s]= Integrate[us,{x,0,s}] )
Do[ll0[j] = fu[[j]]/(1 + us[[-1, j]]);, {j, nt}];
Do[ll[i, j] =
If[i == 1,
ll0[j], (ll0[j] +
h/2 ( Sum[[Mu] (uu[k, j] + uu[k, j - 2] - 2 uu[k, j - 1])/
dt^2 + c/dt /2 (uu[k, j] - uu[k, j - 2]), {k, 1,
i - 1}] +
Sum[[Mu] (uu[k, j] + uu[k, j - 2] - 2 uu[k, j - 1])/dt^2 +
c/dt /2 (uu[k, j] - uu[k, j - 2]), {k, 2, i}]))/(1 +
us[[i, j]])];, {i, nn}, {j, 3, nt}];
(the Lagrange multiplier
[Lambda](t,s)=[Lambda]0(t)+Integrate[[Mu] D[u[t,x],t,t]+c
D[u[t,x],t],{x,s,l}]/(1+D[u[t,s],s]))
bcrhs[j_] := (1 + 1/2 (ds[[1]] . V[[All, j]])^2) (ds[[2]] .
V[[All, j]])^2 +
ds[[2]] .
V[[All, j]] (2 ds[[1]] . V[[All, j]] ds[[2]] . V[[All, j]] +
4 (ds[[1]] . V[[All, j]])^3 ds[[2]] .
V[[All, j]]) + (1 + (ds[[1]] . V[[All, j]])^2 + (ds[[1]] .
V[[All, j]])^4) ds[[3]] . V[[All, j]];
(Initial Condition){x0, vx0, y0, vy0} = {.0, .01, 0,
0.05}; z0 = -Sqrt[R^2 - x0^2 - y0^2];
Do[uu[i, 1] = 0; uu[i, 2] = 0; vv[i, 1] = 0;
vv[i, 2] = 0;, {i, nn}]; Do[xx[i] = x0; vpx[i] = vx0; yy[i] = y0;
vpy[i] = vy0; zz[i] = z0; tt1[i] = -mp g R/z0;
tt2[i] = mp g/Sin[alpha], {i, 2}]; ll0[1] = -tt2[1] Cos[alpha];
ll0[2] = -tt2[2] Cos[alpha]; Do[ll[i, j] = ll0[1], {i, nn}, {j, 2}];
test = Table[.1, {nn}];
Do[(Verlet explicit step)
fx = If[j <= 2, 0,
mp (U[[-1, j]] + U[[-1, j - 2]] - 2 U[[-1, j - 1]])/dt^2 +
cp (U[[-1, j]] - U[[-1, j - 1]])/dt ];
fy = If[j <= 2, 0,
mp (V[[-1, j]] + V[[-1, j - 2]] - 2 V[[-1, j - 1]])/dt^2 +
cp (V[[-1, j]] - V[[-1, j - 1]])/dt ];
xx[j + 1] =
xx[j] + vpx[j] dt - (fx + cp vpx[j] + tt1[j] xx[j]/R) dt^2/2 ;
vpx[j + 1] = vpx[j] - (fx + cp vpx[j] + tt1[j] xx[j]/R) dt;
yy[j + 1] =
yy[j] + vpy[j] dt - (fy + cp vpy[j] + tt1[j] yy[j]/R) dt^2/2 ;
vpy[j + 1] = vpy[j] - (fy + cp vpy[j] + tt1[j] yy[j]/R) dt;
zz[j + 1] = -Sqrt[R^2 - xx[j + 1]^2 - yy[j + 1]^2];
tt1[j + 1] = -R/
zz[j + 1] (mp g + (mp (zz[j + 1] + zz[j - 1] - 2 zz[j])/dt^2 +
cp /dt/2 (zz[j + 1] - zz[j - 1])));
tt2[j + 1] = -tt1[j + 1] zz[j + 1]/R/ Sin[alpha];
(beam implicit step)
r2 = EI ds[[1]] . bcrhs[j + 1] -
lambda[[All, j + 1]] (ds[[2]] . V[[All, j + 1]]);
eq2 = [Mu] (V[[All, j + 1]] + V[[All, j - 1]] - 2 V[[All, j]]) +
c dt/2 (V[[All, j + 1]] - V[[All, j - 1]]) + dt^2 r2;
eqs = Table[Drop[Drop[eq2, 2], -2][[i]] == 0, {i, nn - 4}];
varAll = V[[All, j + 1]];
bC0 = {(ds[[1]] . V[[All, j + 1]])[[1]] == 0, V[[1, j + 1]] == 0};
bC1 = {lambda[[-1, j + 1]] (ds[[1]] . V[[All, j + 1]])[[-1]] -
EI bcrhs[j + 1][[-1]] ==
fv[[j + 1]], (ds[[2]] . V[[All, j + 1]])[[-1]] == 0};
eqAll = Join[eqs, bC0, bC1];
ini = Table[{varAll[[i]], test[[i]]}, {i, Length[varAll]}];
sol = Quiet@
FindRoot[eqAll, ini,
Method -> {"Newton", "StepControl" -> "TrustRegion"},
MaxIterations -> 20]; test = varAll /. sol;
Do[vv[i, j + 1] = test[[i]], {i, nn}];, {j, 2,
jmax - 1}] // AbsoluteTiming
It takes about 1210 s on my laptop, finally we have similar pictures as above

Visualization $\lambda(t,s)$ (solid lines computed at s=sgrid) together with $\lambda_0(t)$ from Update 1 (red dashed line)












constraint, it should be(1+Derivative[0,1][u][t,s])^2+Derivative[0,1][v][t,s]^2==1- see equation (3) in the paper. – Alex Trounev Jan 18 '24 at 01:14NDSolve. – rnotlnglgq Jan 18 '24 at 01:20bcrhs, you've missed a^2in the end. 3. I suggest usingWithto rewrite the system so it'll be easier to check.