This may simply be just an error in transcribing desired system for assessment. However, I post this to amplify Gregory Rut's answer for the coded system. Please note:
- documentation of Poincare section uses well defined non-linear system with specific initial conditons. This is somewhat different to this system and what is being tabulated.
- I am using the coupled linear system coded for and not the one in $\LaTeX$ which seems different (note the latter grows exponentially up very quickly, where as the former grow linearly ).
- this system can be solved analytically and I exploit this for illustrative purposes (noting the similar pattern to Gregory Rut).
- ideally I would have liked to place the axes labels. However, MMA10 seems to not do this well (I'd be interested in other users advice)
I have only plotted small t range (as solutions grow).
fun[a_, b_, c_, d_] :=
DSolve[{x'[t] == p[t], p'[t] == -x[t] - y[t], y'[t] == q[t],
q'[t] == -y[t] - x[t], x[0] == a, y[0] == b, p[0] == c,
q[0] == d}, {x[t], y[t], p[t], q[t]}, t];
tab =Table[{x[t], y[t], q[t]} /.First@fun[0.010, .01, 0.005, j], {j, -.01, .01, .00125}];
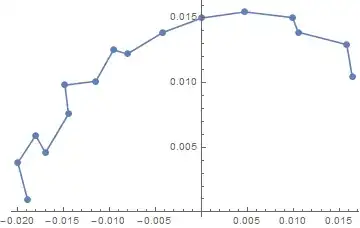
Plotting typical solutions with time (last entry of table):

Now, the table is a set of solutions for different initial conditions ($q(t)$). For any one solution you could section with perturbing initial condition ($q(t)$ which is y velocity) the following is an interactive example. I believe both the typical solution and the interactive approach illustrate the expected reason for small number of points: solutions leave space very quickly. I guess it gives insight as to how quickly solutions diverge with change in initial condition.
Manipulate[
Show[ParametricPlot3D[Evaluate@tab[[1 ;; pl]], {t, 0, 30},
PlotPoints -> 200, MeshFunctions -> {#1 &}, Mesh -> {{x0}},
MeshStyle -> PointSize[0.02], LabelStyle -> 12, PlotStyle -> st],
ContourPlot3D[
x == x0, {x, -0.06, 0.06}, {y, -0.08, 0.08}, {z, -0.08, 0.08},
Mesh -> False, ContourStyle -> {Blue, Opacity[0.2]}],
ImagePadding -> 20, ImageSize -> 500,
PlotRange -> {{-0.06, 0.08}, {-0.06, 0.08}, {-0.08,
0.08}}], {st, {None, Automatic}}, {x0, -0.04, 0.04}, {pl,
Range[17]},
Initialization :> (fun[a_, b_, c_, d_] :=
DSolve[{x'[t] == p[t], p'[t] == -x[t] - y[t], y'[t] == q[t],
q'[t] == -y[t] - x[t], x[0] == a, y[0] == b, p[0] == c,
q[0] == d}, {x[t], y[t], p[t], q[t]}, t];
tab = Table[{x[t], y[t], q[t]} /.
First@fun[0.010, .01, 0.005, j], {j, -.01, .01, .00125}];)]

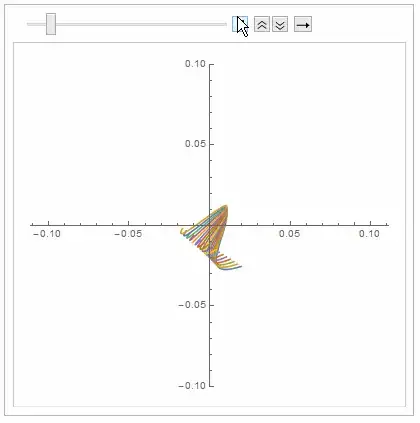
And similar insights are developed by just looking at x-y plane (with time) for the various initial conditions:
ListAnimate[
Table[ParametricPlot[Evaluate@tab[[All, {1, 2}]], {t, 0, j},
PlotRange -> {-0.1, 0.1}], {j, 1, 20}]]