I'have a 2d-system of differential equations, analitycally solved, depending on a parameter. I know that, by continuity, there exist a minimum value of the parameter such that trajectory passes through a specific point. My problem is to find such value (also approximatively).
This is the system-equation:
ti = 0;
yi = 0;
zi = -.75;
zf = -.5;
eps=.01;
sol = FullSimplify[DSolve[{y'[t] == 1/(2 zf) y[t] - u z[t],
z'[t] == -1 + 1/zf z[t] + u y[t], y[ti] == yi, z[ti] == zi},{y[t],z[t]},t]];
The parameter is u.
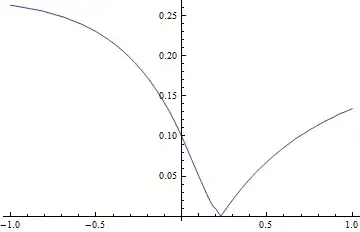
I have to find the first u such that trajectorie intersect the point: z=zf; y=Sqrt[-2*(zf)*eps + eps^2]
Note that this point is done by the intersection between z=zf and the circle of radius |zf|+eps.
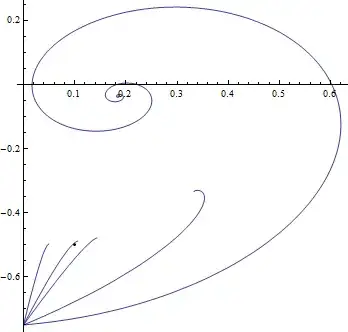
In the following, you can see an animation of the system:
Manipulate[
Module[{sol, y, z, t},
sol = First@DSolve[{y'[t] == 1/(2 zf) y[t] - u z[t],
z'[t] == -1 + 1/zf z[t] + u y[t], y[ti] == yi,
z[ti] == zi}, {y[t], z[t]}, t];
Show[p1, p2, Graphics[{Red, Line[{{0, -1}, {0, 1}}]}],
Graphics[{DotDashed, Red, Thickness[.006],
Line[{{-1, zf}, {1, zf}}]}],
ParametricPlot[{y[t] /. sol, z[t] /. sol}, {t, 0, tend},
PlotStyle -> Thickness[.004]]]],
{{tend, .1, "t"}, .01, 20, .1, Appearance -> "Labeled"},
{{u, 10, "u"}, -300, 300, .5, Appearance -> "Labeled"},
{{zi, -.75, "zi"}, -1, 1, Appearance -> "Labeled"},
{{yi, 0, "yi"}, -1, 1, Appearance -> "Labeled"},
Initialization :>
(deltaA[y_, z_] := 1/(2 zf) y^2 - z + 1/zf z^2;
circ[y_, z_] := y^2 + z^2;
p2 = ContourPlot[{circ[y, z] == (-zf + eps)^2}, {y, -1,
1}, {z, -1, 1}, ContourStyle -> Yellow, GridLines -> Automatic,
Frame -> True, FrameLabel -> {"y", "z"}, RotateLabel -> False,
LabelStyle -> {FontSize -> 20}];
p1 = ContourPlot[{deltaA[y, z] == 0}, {y, -1, 1}, {z, -1,
1}, ContourStyle -> Green, GridLines -> Automatic,
Frame -> True, FrameLabel -> {"y", "z"}, RotateLabel -> False,
LabelStyle -> {FontSize -> 20}];)]
Manipulateto show the behaviour of the system. Anyway, maybe I've not understand your question...the definitions ofy[t],z[t]come from DSolve. They are analytic.. – Mike84 Jul 16 '14 at 18:18