I am trying to create a simulation of a robot with Ackerman steering (the same as a car). For now I'm assuming that it's actually a 3-wheeled robot, with two wheels at the back, and one steering wheel at the front:
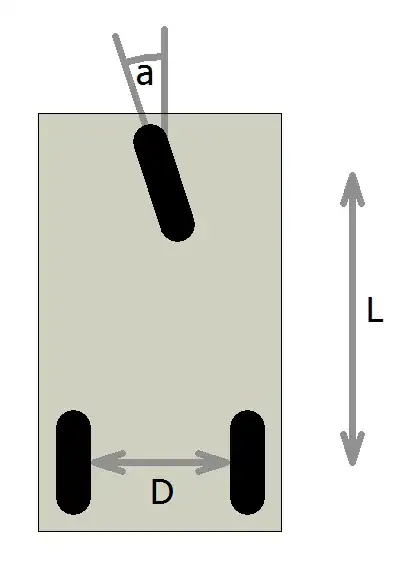
Knowing the wheel velocity, and the steering angle a, I need to be able to update the robot's current position and velocity with the new values at time t+1.
The obvious way to do this would be to calculate the position of the centre of rotation, where the axles of the wheels would meet, however, this leads to an undefined centre of rotation when a = 0. This means that the model doesn't work for the normal case of the robot just driving in a straight line.
Is there some other model of Ackerman steering which works over a reasonable range of a?