Symbolic solution
Even though Mathematica cannot solve straightforwardly the original system we can get the symbolic solutions with a little bit smarter approach. Let's observe that we can get rid of x'[t] and x''[t] from the system by changing variables y -> z[t] == k - c y[t], thus z'[t] == -c y'[t] and z''[t] == -c y''[t] therefore x''[t] == (k - c y[t]) y'[t] implies that x''[t] == -1/c z[t] z'[t], integrating it we get c x'[t] + 1/2 z[t]^2 + d == 0, where d is a constant of integration. Inserting this into the second equation yields
z''[t] + 1/2 z[t]^3 + d z[t] == 0
This equation can be solved in terms of Jacobi elliptic functions:
sols = z[t] /. DSolve[{z''[t] + 1/2 z[t]^3 + d z[t] == 0}, {z[t]}, {t}]
Recalling that z[t] == k - c y[t] we can easily figure out periodic-like behaviour of y[t] found in numerical calculations. In order to get x[t] we need inserting y[t] into the original system, then integrating with respect to t. It seems that we should work with appropriate initial conditions y[0] and y'[0] and choose adequate branches of solutions. Then various special cases could clarify the overall behaviour of the system, let's consider a special case.
sd041 = FullSimplify[sols /. {d -> 0, C[1] -> 4, C[2] -> 1}, t > 0]
{-2 JacobiSN[1 + t, -1], 2 JacobiSN[1 + t, -1]}
Taking the second equation of the original system we can get x'[t] (assuming c == 1 and k == 1):
FullSimplify[ D[ sd041[[1]], {t, 2}]/(1 - sd041[[1]]), t > 0]
(4 JacobiSN[1 + t, -1]^3)/(1 + 2 JacobiSN[1 + t, -1])
and x[t] is (putting the constant of integration equal to zero):
xx = Integrate[(4 JacobiSN[1 + t, -1]^3)/(1 + 2 JacobiSN[1 + t, -1]), t]
We plot only the real part of xx as x[t], (this is because of another issue, see e.g. Why does Integrate declare a convergent integral divergent? )
Plot[{ Re @ xx, 1 - sd041[[1]]}, {t, 0, 20}]

and the solution in the phase space is
ParametricPlot[{ Re @ xx, 1 - sd041[[1]]}, {t, 0, 20}]

At this point it is plausible to exploit numerical capabilities of the system
Numerical solution
We can exploit NDSolve and including arbitrary initial conditions, we can compare various cases:
With[{c = 1/4, k = 4/1000},
ds = NDSolve[{x''[t] == (k - c y[t]) y'[t],
y''[t] == -(k - c y[t]) x'[t],
x[0] == 1, y[0] == 0, x'[0] == 2, y'[0] == -1},
{x[t], y[t]}, {t, 0, 150}]];
{X[t_], Y[t_]} = {x[t], y[t]} /. First @ ds;
Now we plot the solution in the range 0 < t < 50:
Plot[{X[t], Y[t]}, {t, 0, 50}]

as well as its derivative
Plot[{X'[t], Y'[t]}, {t, 0, 50}]
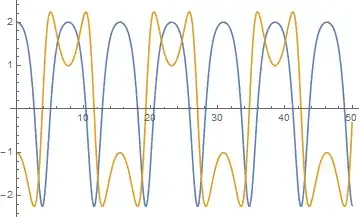
Another interesting feature can be observed with the parametric plot of the solution:
ParametricPlot[{X[t], Y[t]}, {t, 0, 60}]

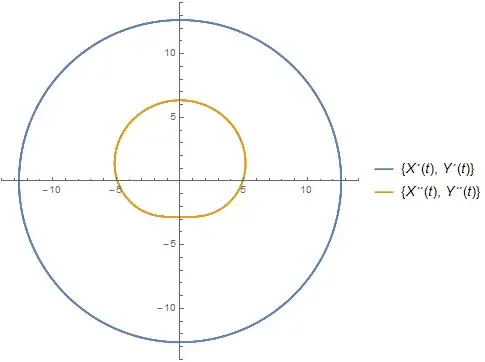
and it is expected to compare the first and the second derivatives of the solution, we can do it with the animated parametric plot:
tab =
Table[ ParametricPlot[{{X'[t], Y'[t]}, {X''[t], Y''[t]}}, {t, 0, v},
PlotLegends -> Placed[Style[Row[{"t = ", NumberForm[N@v, {3, 1}]}],
Bold, 20], {Left, Top}],
PlotRange -> {{-3.5, 3.5}, {-3.5, 3.5}}], {v, 1, 16, 1/6}];
ListAnimate[ tab, Paneled -> False]

Edit
The OP expected solutions with reversed values (c == 4/1000, k == 1/4)
Then the system behaves in a different way:
With[{c = 4/1000, k = 1/4},
ds = NDSolve[{x''[t] == (k - c y[t]) y'[t],
y''[t] == -(k - c y[t]) x'[t],
x[0] == -16, y[0] == 4,
x'[0] == 12, y'[0] == -4}, {x[t], y[t]}, {t, 0, 130}]];
{X[t_], Y[t_]} = {x[t], y[t]} /. First@ds;
Now the phase space solution is more similar to cycloid-like
ParametricPlot[{X[t], Y[t]}, {t, 0, 100}]

ParametricPlot[{{X'[t], Y'[t]},
{X''[t], Y''[t]}}, {t, 0, 100},
PlotLegends -> "Expressions"]
Playing with different initial conditions we can get various patterns of the behaviour, more or less similar to the previous case with {c = 1/4, k = 4/1000}. Nonetheless from programming point of view the task of examining the system is the same.













KandCdo in fact have built in meaning; it is safer if you replace them with lowercase. – MarcoB Feb 23 '17 at 13:16c(t)is a phase-space trajectory? – zhk Feb 23 '17 at 13:17