My defined function next find {nextpoint, nextdirection} value from {startpoint, startdirection} using NSolve.
next[{sp_, sd_}][δ_] := Module[{φ, sol, fp, fd},
sol = NSolve[{{x[φ, δ], y[φ, δ]} ==
sp + t sd, Abs[t] > 10^(-9), 0 <= φ < 2 π}, {t, φ}, Reals]// Quiet;
sol = If[Length[sol] > 0, sol[[1]]];
fp = {x[φ, δ], y[φ, δ]} /. sol;
fd = rDirec[sd, (D[y[φ, δ], φ]/D[x[φ, δ], φ] /. sol)];
{fp, fd}
]
and second function rDirec is to decide reflected direction that is transformed by the following diagram.

rDirec[d_, m_] := With[{sd = Normalize[N@d], θ = ArcTan[m]},
RotationTransform[θ][ReflectionTransform[{0, 1}][
RotationTransform[-θ][sd]]] // Normalize
]
This is your function for drawing.
x[φ_, δ_] := Sin[φ] + δ/2 Sin[φ] + δ/6 Sin[3φ];
y[φ_, δ_] := -Cos[φ] + δ/2 Cos[φ] - δ/6 Cos[3φ];
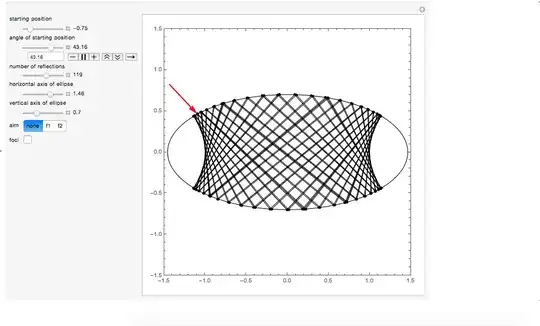
now you can use these next and rDirec for reflecting process of any parametric functions like this.
Manipulate[
list = NestList[next[#][δ] &, {{x[s, δ], y[s, δ]},{1, 1.7}},20]//Quiet;
ParametricPlot[{x[φ, δ], y[φ, δ]}, {φ, 0, 4 π},
Epilog -> {Blue,
Arrow[{#[[1]], #[[1]] + Normalize[#[[2]]]/5}] & /@ list,
Black, Line[Partition[Transpose[list][[1]], 3, 1]],
Red,
Arrow[{list[[1, 1]], list[[1, 1]] + Normalize[list[[1, 2]]]/5}]}],
{{δ, 0.4}, 0.1, 0.9}, {s, 0, π/4},
ContinuousAction -> False,
SaveDefinitions -> True
]

Version Update
list = {};
DynamicModule[{list,φ,p1, p2, bf = False, pf = False, df = 0.4, sf = 0},
Manipulate[
p1 = {x[φ, δ], y[φ, δ]};
If[df != δ, list = {}; bf = False; pf = False]; df = δ;
If[sf != φ, p2 = Through[{Cos, Sin}[φ + π/2]]/4]; sf = φ;
If[! pf,
Graphics[Locator[Dynamic[p1 + p2, (p2 = Normalize[# - p1]/4) &]],
Prolog -> {Blue,
If[list =!= {} && bf, {Opacity[0.2],
Arrowheads[Small],
Arrow[{#[[1]], #[[1]] + Normalize[#[[2]]]/4}] & /@ list,
Black, Line[Partition[Transpose[list][[1]], 3, 1]],
Red, Opacity[1], Arrowheads[Medium],
Arrow[{list[[1, 1]],list[[1, 1]] + Normalize[list[[1, 2]]]/4}]}],
Black,
ParametricPlot[{x[θ,δ], y[θ,δ]}, {θ, 0, 4 π}][[1]],
Orange, PointSize[Large], Point[p1], Thick,
Dynamic@Arrow[{p1, p1 + p2}]
}, Axes -> True, PlotRange -> {{-1.3, 1.3}, {-1, 1}},
ImageSize -> 300],
lines = Partition[Transpose[list][[1]], 3, 1];
Animate[Graphics[{Opacity[0.2], Line@lines[[;;t]]},
Epilog -> {
Black,
ParametricPlot[{x[θ,δ], y[θ,δ]}, {θ, 0, 4 π}][[1]],
Orange, PointSize[Large], Point[p1], Thick,
Dynamic@Arrow[{p1, p1 + p2}]
}, Axes -> True, PlotRange -> {{-1.3, 1.3}, {-1, 1}},
ImageSize -> 300], {t, 1, Length[lines], 1}, Paneled -> False,
ControlPlacement -> Bottom]
],
Pane[Row[{
Pane[Column[{
Row[{Button[" Run ", bf = True; pf = False;
list = NestList[next[#][δ] &, {{x[φ,δ], y[φ,δ]}, p2}, 10]],
Dynamic@Button[If[! pf, " Play ", " Back "], pf = ! pf,
Enabled -> bf,
Background -> If[! pf, Automatic, Orange]]}],
Row[Button["+" <> ToString@#,
list = Join[list, NestList[next[#][δ] &,
If[list === {},
If[bf, {{x[φ,δ], y[φ,δ]}, p2}],
Last[list]], #]], Enabled -> Dynamic@bf] & /@ {5, 10, 20}]}
], ImageMargins -> {{0, 20}, {0, 0}}],
Pane[Column[{
Control@{{δ, 0.4}, 0.1, 0.9},
Control[{{φ,π/4}, 0, 2 π}]}]]}]],
ContinuousAction -> True,
SaveDefinitions -> True]]
Example

or