update
Ok, there was another issue, thanks konradb3 for the patch! The new release simulator_gazebo 1.6.16 deb is out.
Thanks for posting the model, I was able to test it and found a transform bug when I tried to tweak the urdf2gazebo parser. It's fixed in trunk. I'll make a release (simulator_gazebo 1.6.14) this weekend.
Originally posted by hsu with karma: 5780 on 2012-08-24
This answer was ACCEPTED on the original site
Post score: 0
Original comments
Comment by konradb3 on 2012-08-24:
I checked the svn trunk and it works much better but some problems still remains.
Comment by hsu on 2012-08-24:
great. can you list out the problems or ticket them on trac (https://bitbucket.org/osrf/gazebo/issues?status=new&status=open)? thanks!
Comment by konradb3 on 2012-08-24:
Question updated ...
Comment by shart115 on 2012-08-27:
i'm seeing a similar problem with the Robonaut2 simulator since the update as well.
Comment by rtoris288 on 2012-08-27:
Problem also exists with the youBot URDF from https://github.com/youbot/youbot-ros-pkg
Comment by bsatzinger on 2012-08-27:
I'm seeing similar problems as well. Is there documentation somewhere on the best way to checkout simulator_gazebo from svn trunk and replace the existing version I got from apt-get without goofing everything up?
Comment by shart115 on 2012-08-28:
any updates on this fix? It is somewhat unclear whether the trunk fixes this issue (and it doesnt look like 1.6.14 has been released yet...
Comment by hsu on 2012-08-28:
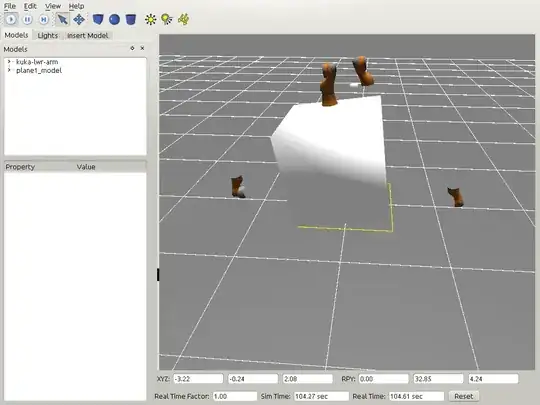
just released 1.6.14 yesterday, deb should be out in a day or two. Is the second picture in your original question correct? That's what I see as well. Is there suppose to be a gap between calib_lwr_arm_base_link and lwr_arm_1_link as shown? Also, you mentioned that something else is broken?
Comment by hsu on 2012-08-28:
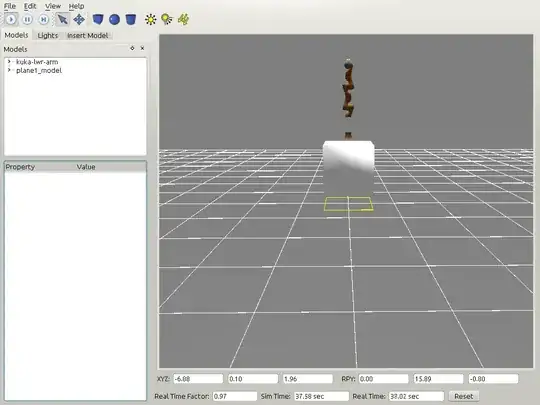
If possible, can you post a picture of what the model should look like? thanks.
Comment by hsu on 2012-08-31:
can someone confirm that simulator_gazebo 1.6.14 fixes the issue?